English
English हिन्दी
हिन्दी
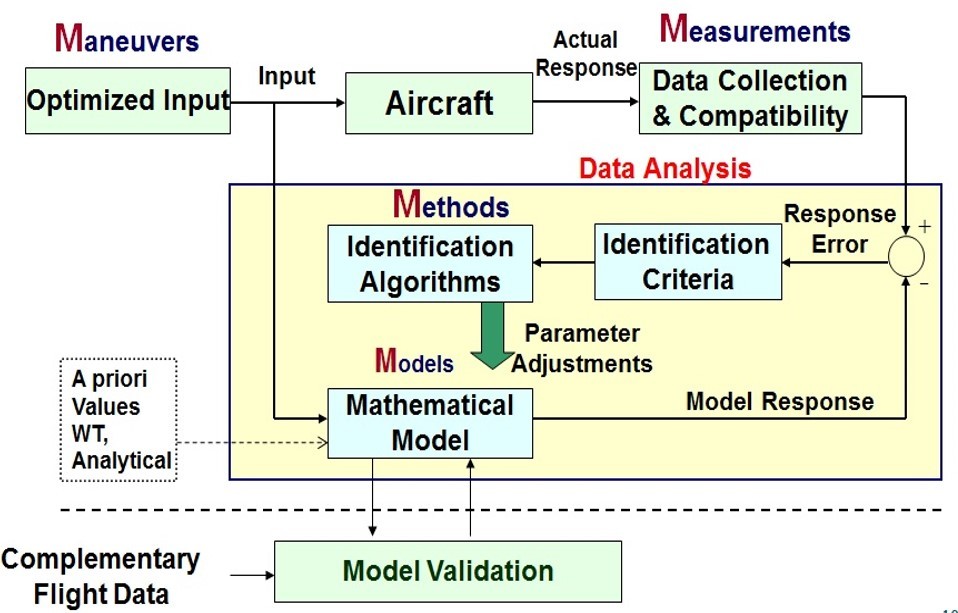
Optimization algorithms for MEMS IMU calibration
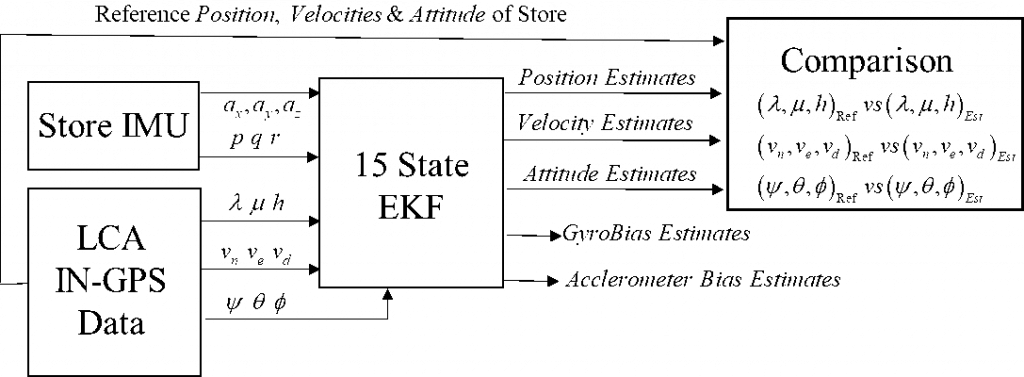
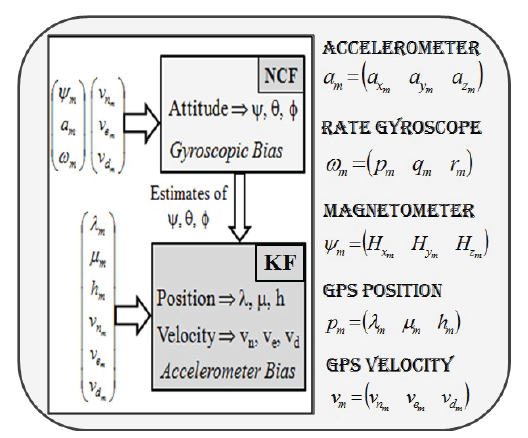
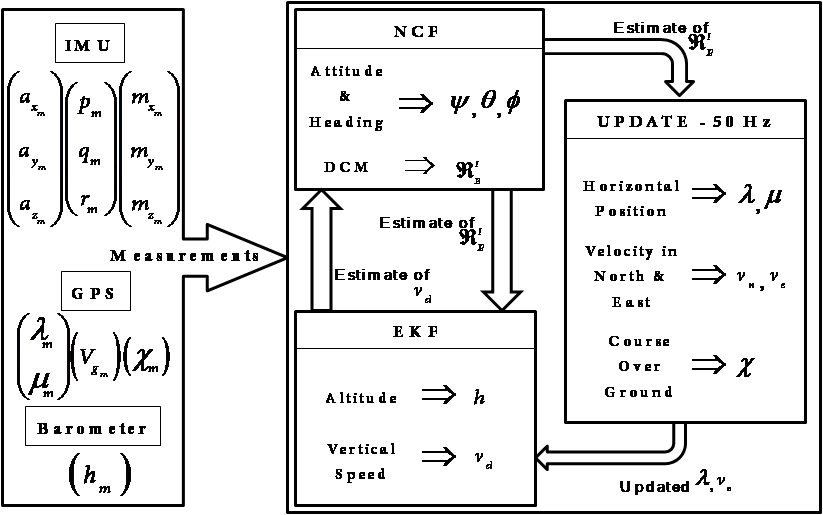
Standard IEEE Calibration methodology and test procedure followed to calibrate MEMS IMU. The intent is to find out stochastic and deterministic errors in tri axial rate gyroscopes and tri axial accelerometers of a MEMS IMU. In the view of this, rate table or turn table tests are conducted to calibrate gyroscopes and tumble tests are carried out to calibrate accelerometers. The misalignment factors of an IMU is obtained from gauss-newton optimization algorithm. Thus obtained calibration constants are further used in an EKF based fusion algorithm. A 6-state & a 9-state Extended Kalman filters are presented to estimate Euler angles and position respectively. Effect of calibration on Euler angles and position estimation is clearly brought out.