English
English हिन्दी
हिन्दी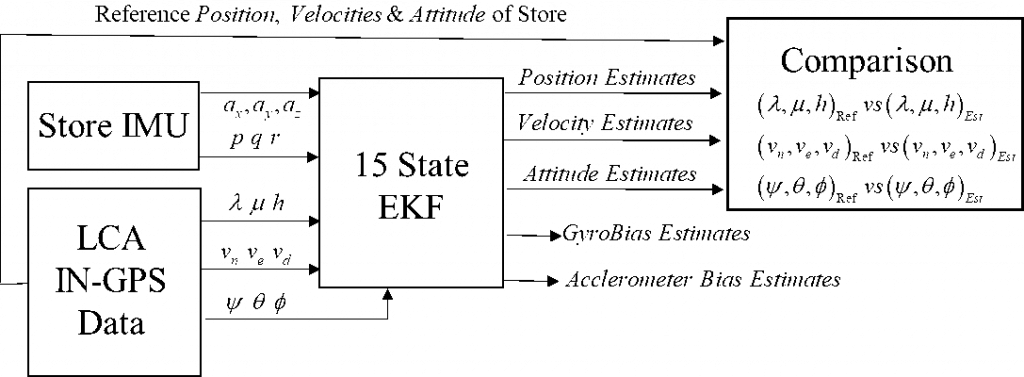
EKF based algorithm for store separation trajectory estimation of LCA
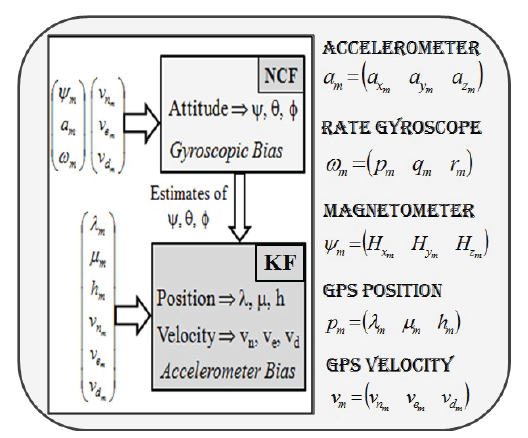
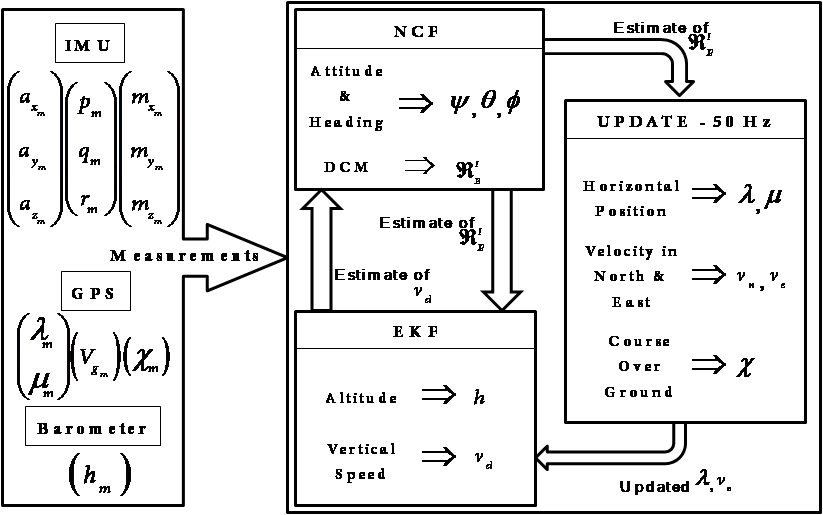
Trajectory of a separated store from LCA has to be estimated with its standalone inertial measurement unit (IMU) sensor data. It is proposed that LCA flight data (IN-GPS data) is used to characterize the store sensors, i.e to estimate biases in rate gyroscopes and accelerometers of stores IMU. This stores sensors bias estimation will be carried out till the store is in captive phase. After the release of the store, sensor biases estimated at the previous instance (just before the store release) will be used throughout the free flight for trajectory estimation.
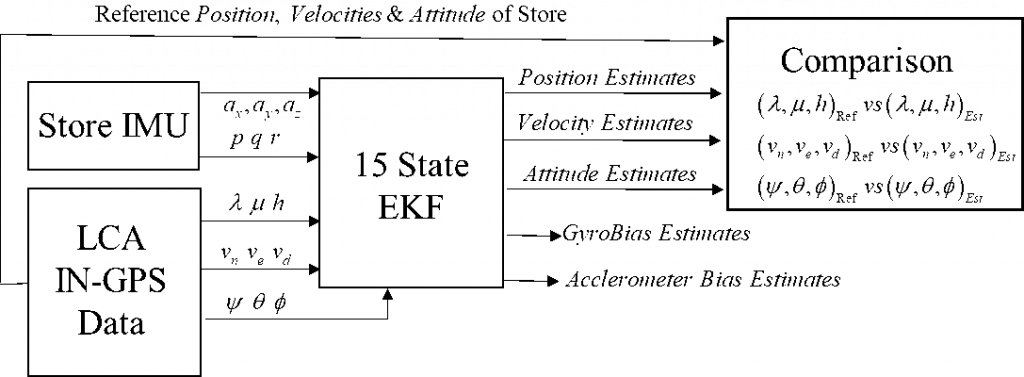
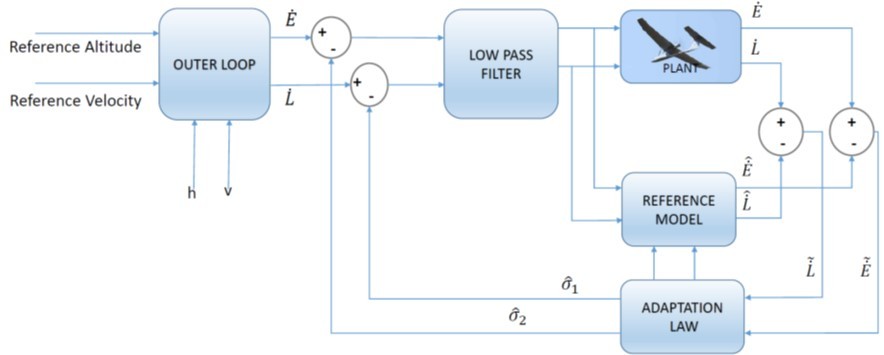
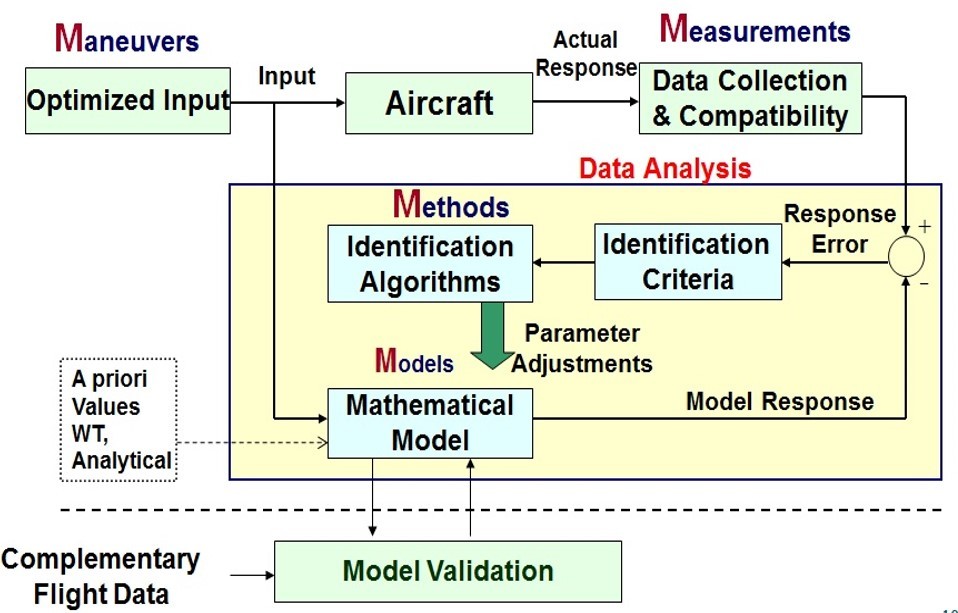
Schematic view of proposed Algorithm