English
English हिन्दी
हिन्दी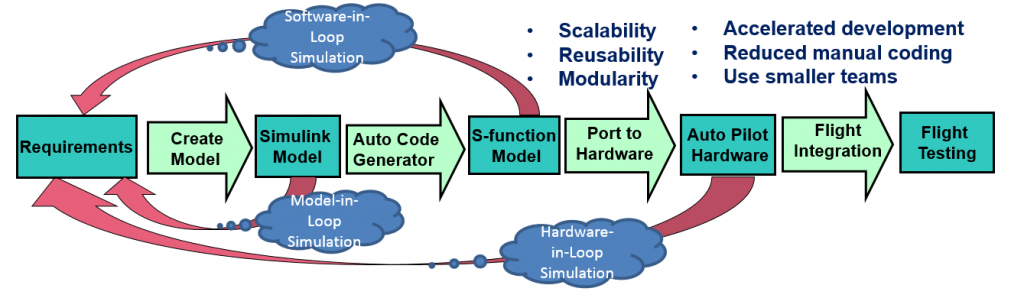
Model based design approach: MAV autopilot functionality design
Model based design framework is getting popular in the aerospace sector for flight control applications. It supports the following concepts
- Providing a common design environment
- Linking designs directly to requirements
- Integrating testing methods with design
- Refining algorithms by means of simulation
- Generation of automatic embedded software code
- Reusing test modules
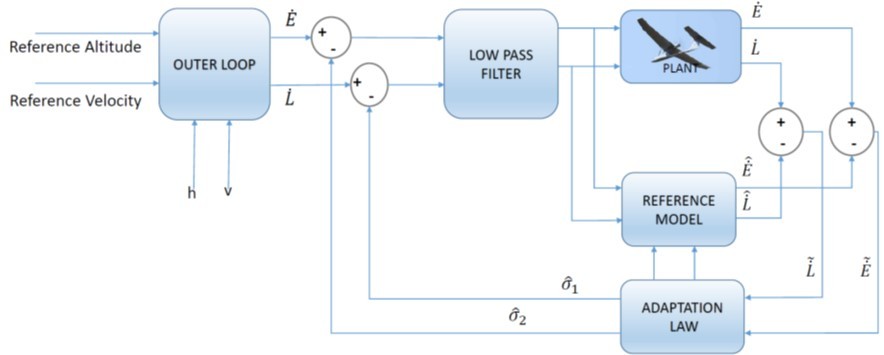
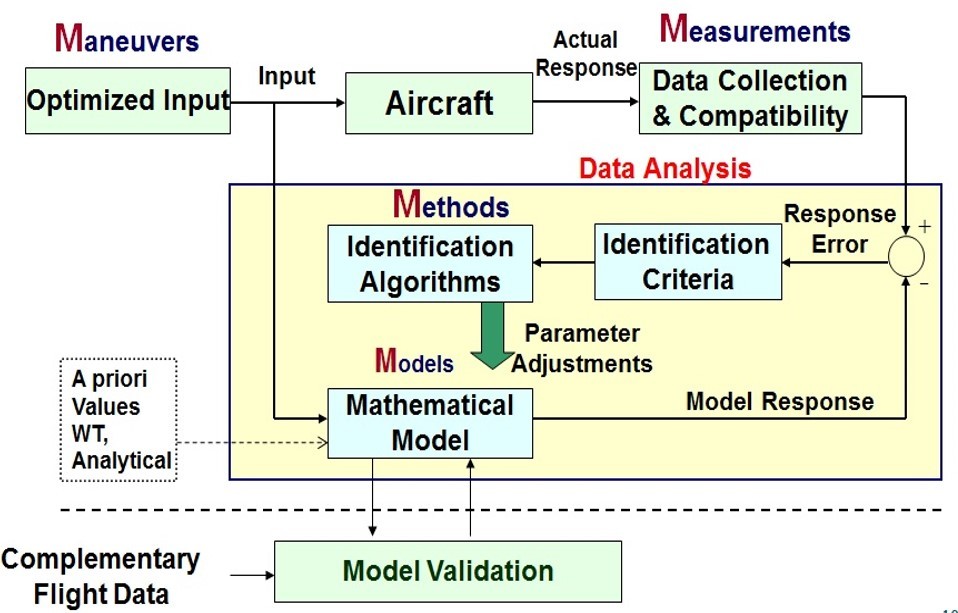
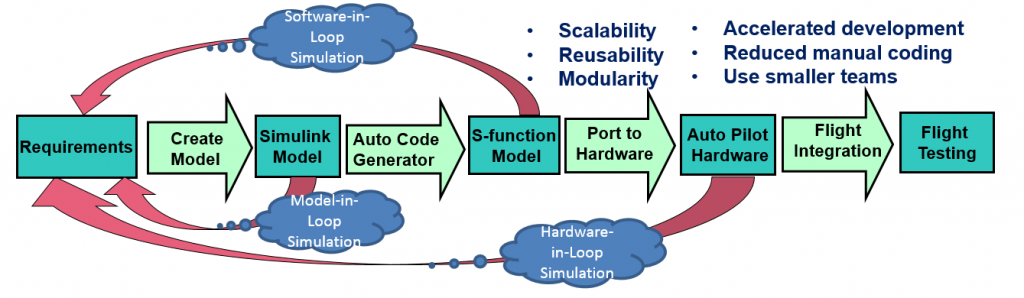
In the present work, the main aim is to generate autocode for the controller and perform a seamless integration of the onboard autopilot software from simulation to onboard implementation. This is achieved using MATLAB/Simulink. The plant model is implemented in Simulink. The control, estimation and path planning algorithms are also implemented in Simulink around the plant model to constitute a Model in the Loop Simulation (MILS). The real-time simulation is carried out in four phases each with a particular purpose such as
- Software in the Loop Simulation (SILS)
- Rapid Control Prototyping (RCP)
- Processor In the Loop Simulation (PILS)
- Hardware In the Loop Simulation (HILS)
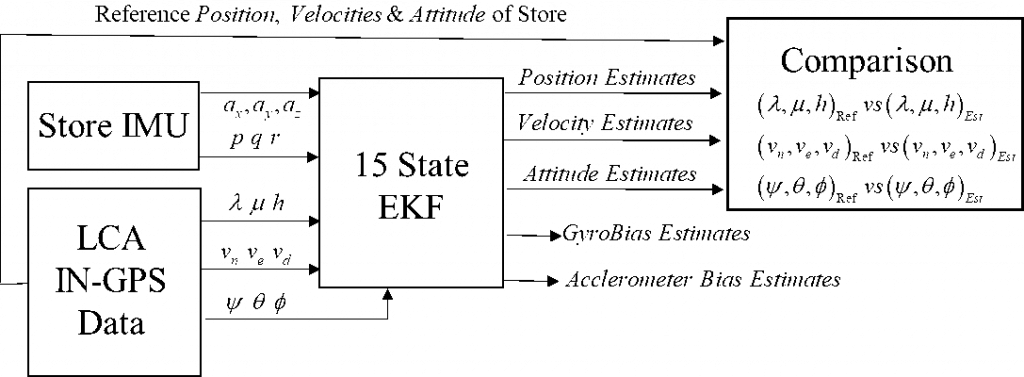
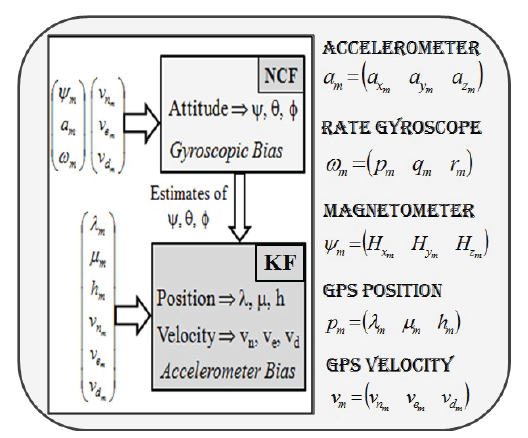
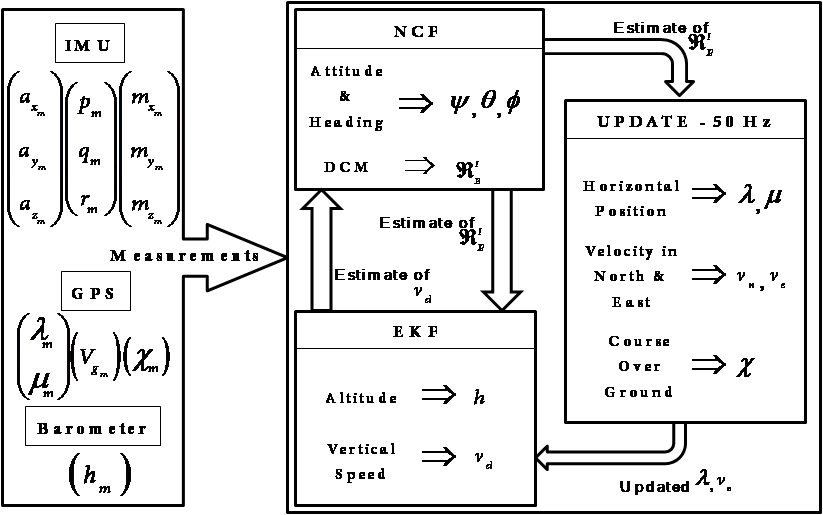
In SILS compiled autopilot code is incorporated into the overall simulation. This is required for evaluation of onboard auto code functionality on designer’s desk. The model based design architecture is shown in Figure below.
Facilities where this techniques is used: Hardware – in - the loop simulation facility.