English
English हिन्दी
हिन्दी
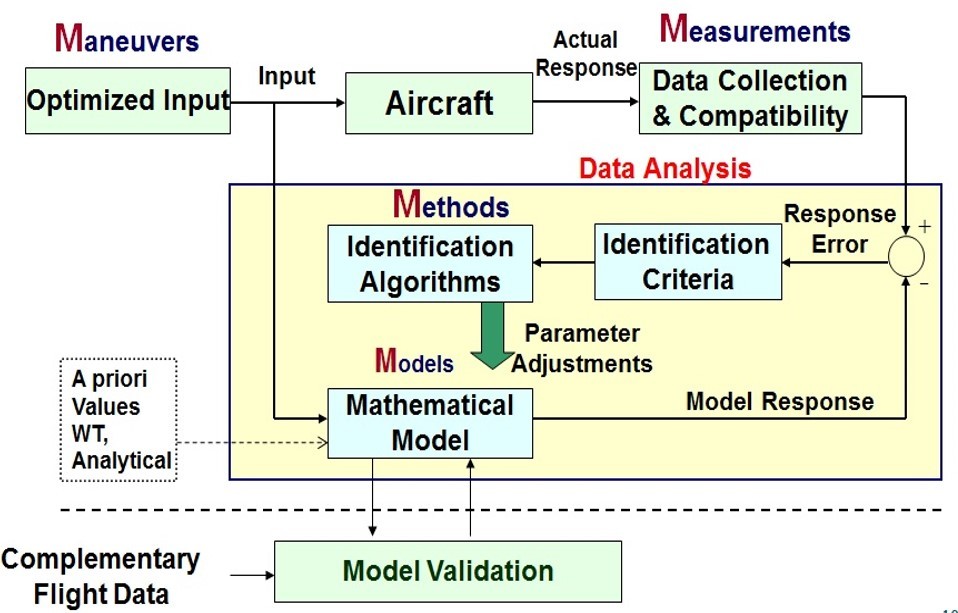
pursuit based guidance control, l-psi control, LQR formation control and L1 adaptive control for the control of multi agent system
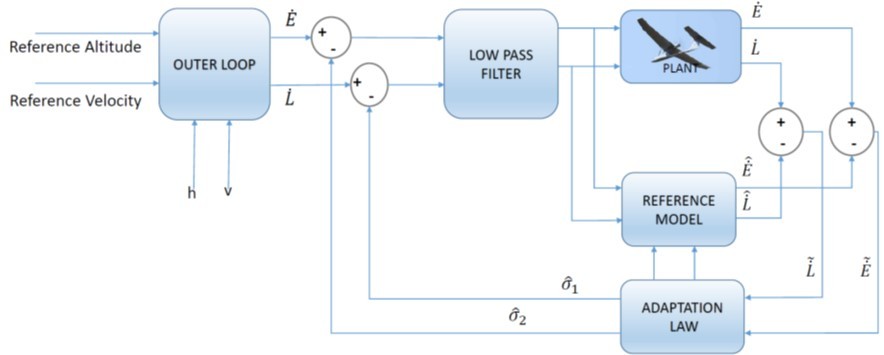
Formation flying control law for micro air vehicles (MAVs) based on a combination of pursuit guidance and l-psi control algorithm are designed, developed and flight tested. The control law continuously tracks and maintains the relative position between the MAV’s so that the overall formation shape and pattern is preserved. By combining the l-psi with the pursuit guidance algorithm the formation shape is maintained even during turns and circles. The designed formation control was verified using techniques from LQR and L1 adaptive control.
Specifications NA
Facilities where these techniques are used
Multi agent Cooperative Control Processor-in-the Loop (PIL) Setup Facility
Major mile stones / results of this technique
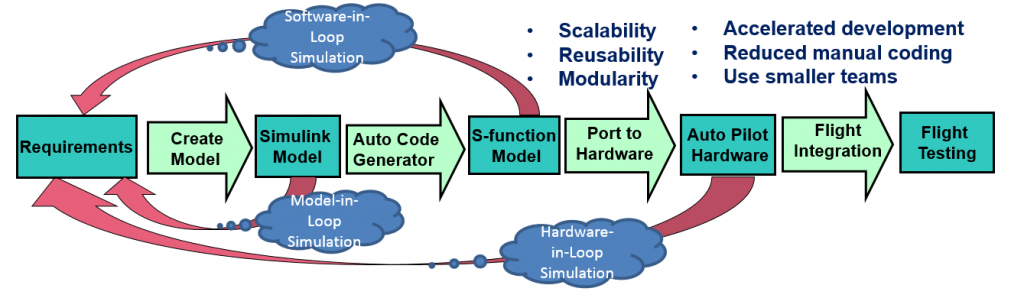
The designed and developed algorithms are successfully tested in the formation flying Processor-in-the Loop (PIL) setup using APM boards, Xbees, Desktops/Laptops for testing 2 MAVs on ground. This is an important step towards real flight testing. In this PIL setup, the designed control algorithms can be integrated to the actual MAV autopilot board and tested on ground for its integrity and satisfactory performance. This setup will give a great amount of confidence and will bring out any issues in the algorithm design and also it will bring out any integration issues well before flight testing.