English
English हिन्दी
हिन्दी
Novel scheme for baseline Flight Controller Design
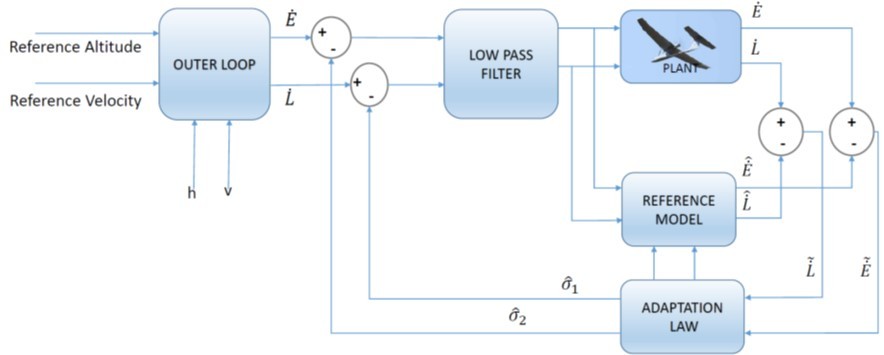
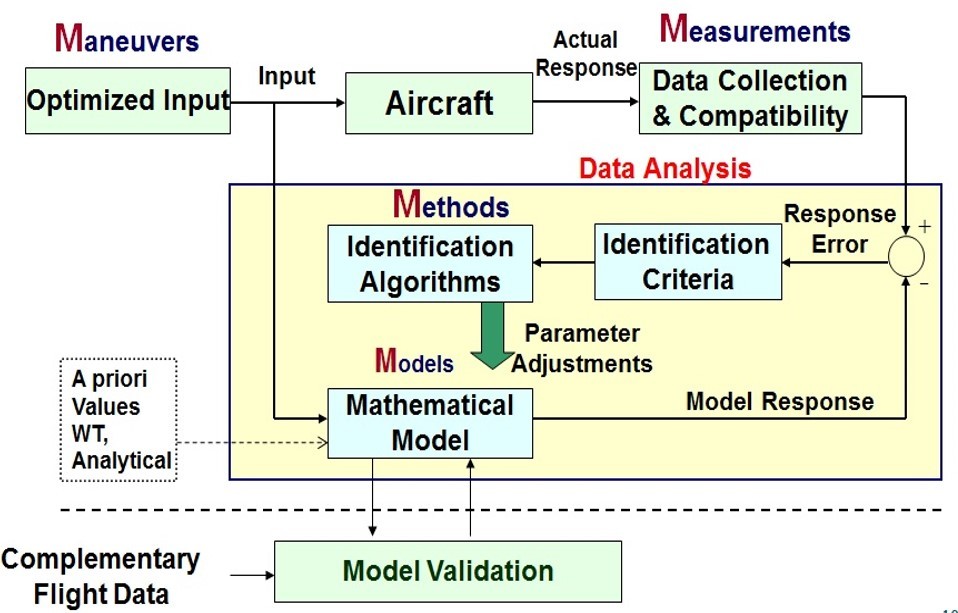
The flight controller is developed using Nonlinear Dynamic Inversion (NDI) in combination with time scale separation, static control allocation and integrator backstepping. The resulting controller has a cascaded structure and is referred to as the Simplified Nonlinear Dynamic Inversion (SNDI) controller. The cascaded controller has control loops which follow the block triangular structure of the aircraft equations of motions. This controller uses Mixed Axis formulation for equations of motion to compensate for the principal nonlinearities such as inertia coupling, kinematic coupling and gravity terms that appear in the aircraft equations of motion and dominate in the nonlinear regimes of flight. A reasonable approximation for the dynamics of the two slow varying states in terms of normal and lateral accelerations respectively will have a major advantage that it avoids the requirement of carrying an approximation of lift and side force within the nonlinear controller. By considering the worst case combination of derivatives, robustness with respect to aerodynamic variation is ensured.
Specifications NA
Facilities where this technique is used F3
Major mile stones / results of this technique
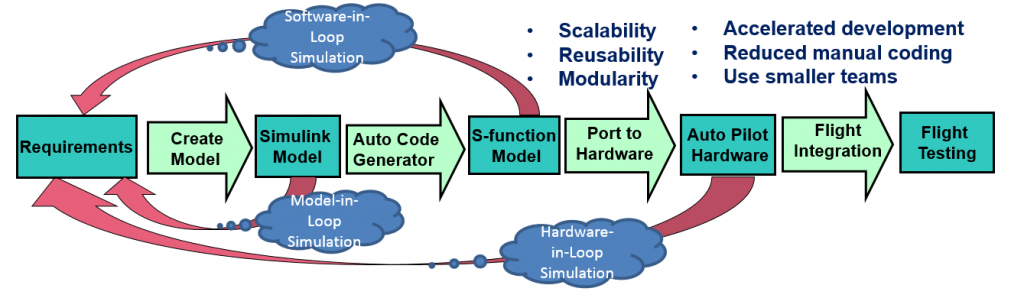
Baseline flight controller design with lesser time and effort (around six to eight weeks), integration to the flight simulator facility.